
🌏 この記事を読み終わるころには、この問題が解けるようになります!
【例題】
「数値予報に関する説明として正しいものはどれか。
① メソモデルの水平格子間隔は20kmで全球を対象とする
② 4次元変分法では観測時刻が客観解析時刻と異なるデータは使用できない
③ 天気予報ガイダンスのカルマンフィルター手法は、数値予報モデルが更新されると長期間のデータ収集が必要になる
④ 格子間隔を半分にすると計算量は約8倍になる」
今回は、スーパーコンピュータを用いた気象予報の仕組み、客観解析・初期値化・解析予報サイクル、局地モデル(LFM)・メソモデル(MSM)・全球モデル(GSM)など各モデルの特性、パラメタリゼーション、CFL条件、そして天気予報ガイダンス(MOS・カルマン・ニューラルネットワーク)まで体系的に学びます。気象予報士試験では数値予報の基礎知識が必ず出題されます。各モデルの水平解像度・予報時間・発表回数を確実に覚えましょう!
目次
- 数値予報のしくみと観測データ
- 客観解析の原理(第一推定値・格子点補間)
- 解析予報サイクルと初期値化
- 4次元変分法
- 代表的な数値予報モデルの種類と特徴
- 数値予報モデルの一覧表(LFM・MSM・GSM等)
- パラメタリゼーション(格子間隔以下の物理過程)
- 数値予報の短所と予報精度の限界
- 天気予報ガイダンス(MOS・カルマン・ニューラル)
- 理解チェックテスト(5問)
- 過去問チャレンジ(5問)
- まとめ
1. 数値予報のしくみと観測データ
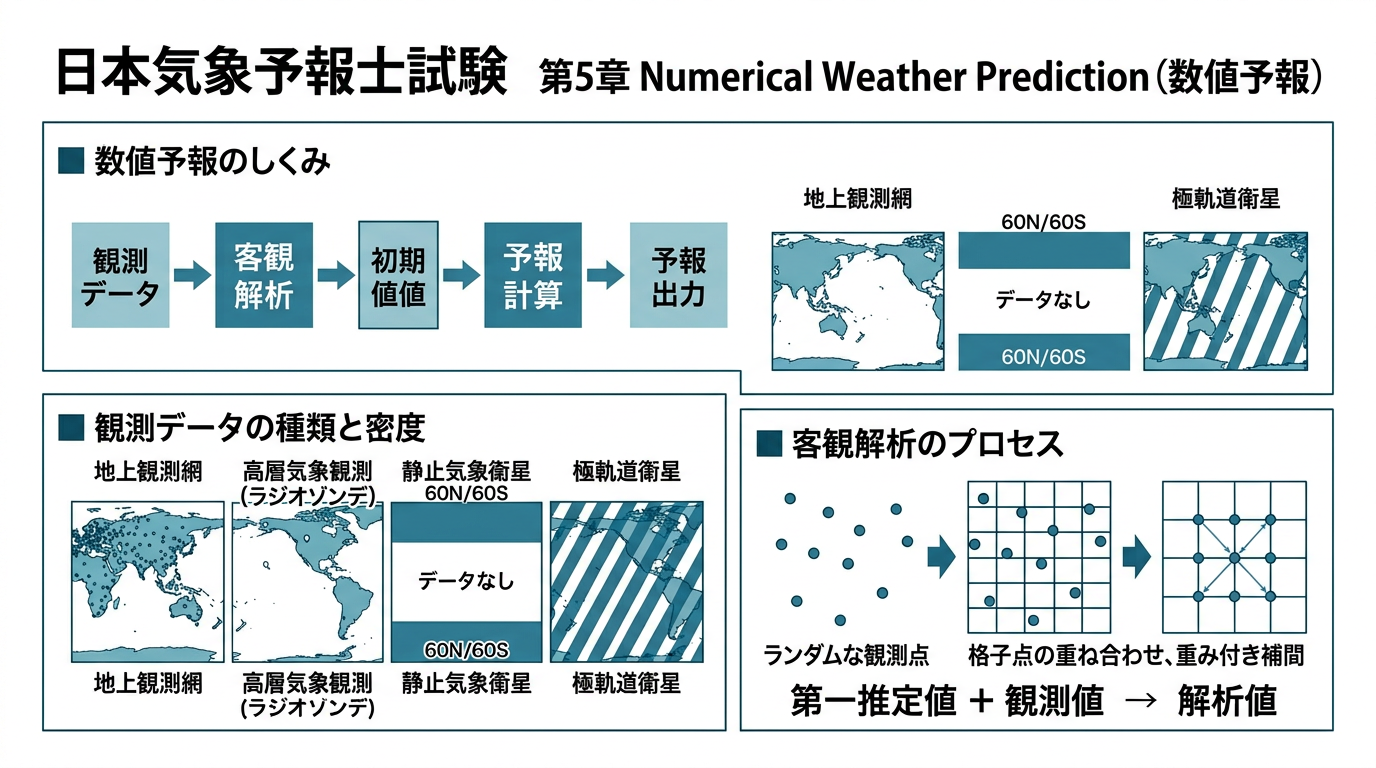
▲ 数値予報の流れと観測データの種類・密度特性
- 数値予報とは、現在の大気状態を観測データから客観的に解析し、スーパーコンピュータで物理方程式を解いて将来の気象を予報する手法
- 観測データ → 客観解析(初期値作成) → 予報計算 → 予報結果 という流れ
- 使用する観測データの種類:地上観測網(陸上に多く、海上・南極はまばら)、高層気象観測(ラジオゾンデ、地上より密度低い)、静止気象衛星(北緯60度以北・南緯60度以南はデータなし)、極軌道衛星(斜め縞状分布、約100分で1周、同一地点を約12時間毎)、航空機観測(海陸問わずライン状)
- 観測データは品質管理を実施し、異常値や局所的不連続データは除外
- 海上の観測密度は陸上より低く、海上天気予報の信頼性が平均的に陸上より低い一因
【観測データの品質管理】
- 定時観測データ以外の非定時データも4次元変分法で客観解析に利用
- 観測値と第一推定値の差があらかじめ定めた基準値より大きい場合は客観解析に使用しない
- 船舶の位置情報も厳重にチェックして利用
2. 客観解析の原理(第一推定値・格子点補間)
- ランダムに分布する観測地点のデータを、水平格子を設定してスーパーコンピュータで客観的に処理する
- 第一推定値:前回の予報値を現在時刻まで予報した値。全球モデルでは6時間前を初期値とした6時間後の予想値
- 客観解析:第一推定値を格子点周辺の観測データで補正し、格子点上の値(解析値)を決定する作業
- 格子点Pの解析値は、周辺複数の観測データに距離に応じた重みをかけ、第一推定値との中間値を求める
- 観測データが存在しない海上の格子点では、第一推定値がそのまま解析値になる
- 格子点の解析値はその格子を代表する平均値として解釈する
💡 第一推定値と解析値の関係
- 第一推定値(過去予報)+観測データによる補正 → 解析値(格子点の確定値)
- 観測データが多い → 解析値は観測値寄り、精度向上
- 観測データがない → 第一推定値がそのまま解析値
3. 解析予報サイクルと初期値化
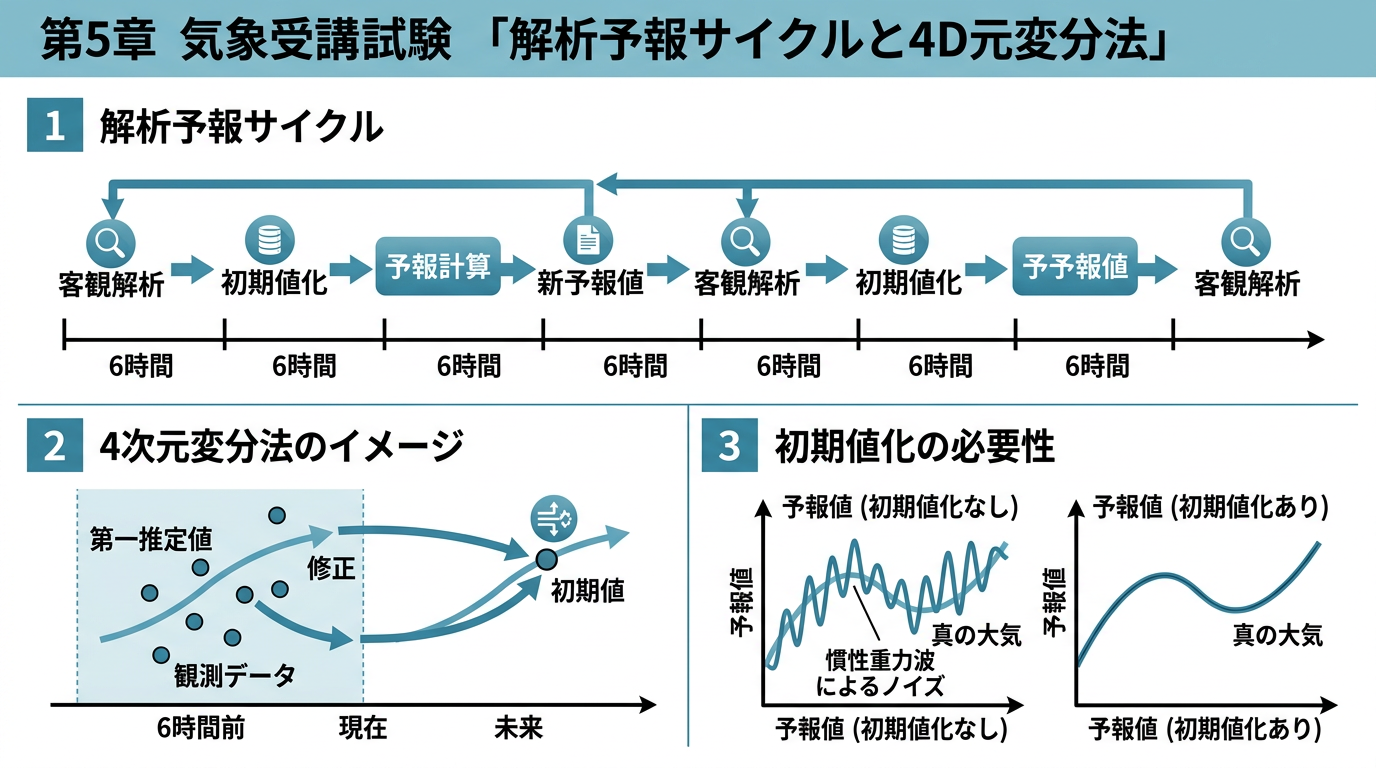
▲ 解析予報サイクルの流れと4次元変分法のイメージ
- 解析予報サイクル:客観解析 → 初期値化 → 予報計算 → 新予報値 → 客観解析…という一連の繰り返し。全球モデルは6時間毎に客観解析を実施
- 初期値化(イニシャリゼーション):客観解析後の格子点値には慣性重力波に関わる誤差が含まれる。これを除去して力学的にバランスのとれた初期値を作成する工程。初期値化は第一推定値と観測値が完全一致する場合でも必ず必要
- 慣性重力波:重力の影響で生じる振動性の波動。これをノイズとして除去しないと予報の初期に現実と異なる気圧変動が生じる
【解析予報サイクルのポイント】
- 客観解析(第一推定値+観測補正) → 初期値化(ノイズ除去) → 予報計算 の順
- 初期値化は常に必要(観測データがない場合も、完全一致した場合も)
- 解析予報サイクルを繰り返すことで海上の客観解析精度の過度な低下を防ぐ
4. 4次元変分法
- 4次元変分法(4D-Var):客観解析に用いる手法。4次元=東西・南北・鉛直の3次元+時間軸
- 客観解析時刻の前後のランダムな時刻の観測データも、時間的重みを考慮(時間的内挿)して取り込む
- 前回の予報値の誤差が観測値で継続的に補正されるため、精度の高い過去の予報の流れを作る
- 非定時データ(航空機・ウィンドプロファイラ等)も利用可能
- 3次元変分法(3D-Var):時間変化を考慮しない、計算量が少ない方法。毎時大気解析モデル等に使用
💡 4次元変分法の利点
- 観測時刻が客観解析時刻と異なるデータも時間的内挿で利用可能
- 過去の期間にわたって観測値で継続補正し精度向上
- ランダム時刻の観測(航空機・船舶等)も活用できる
5. 代表的な数値予報モデルの種類と特徴
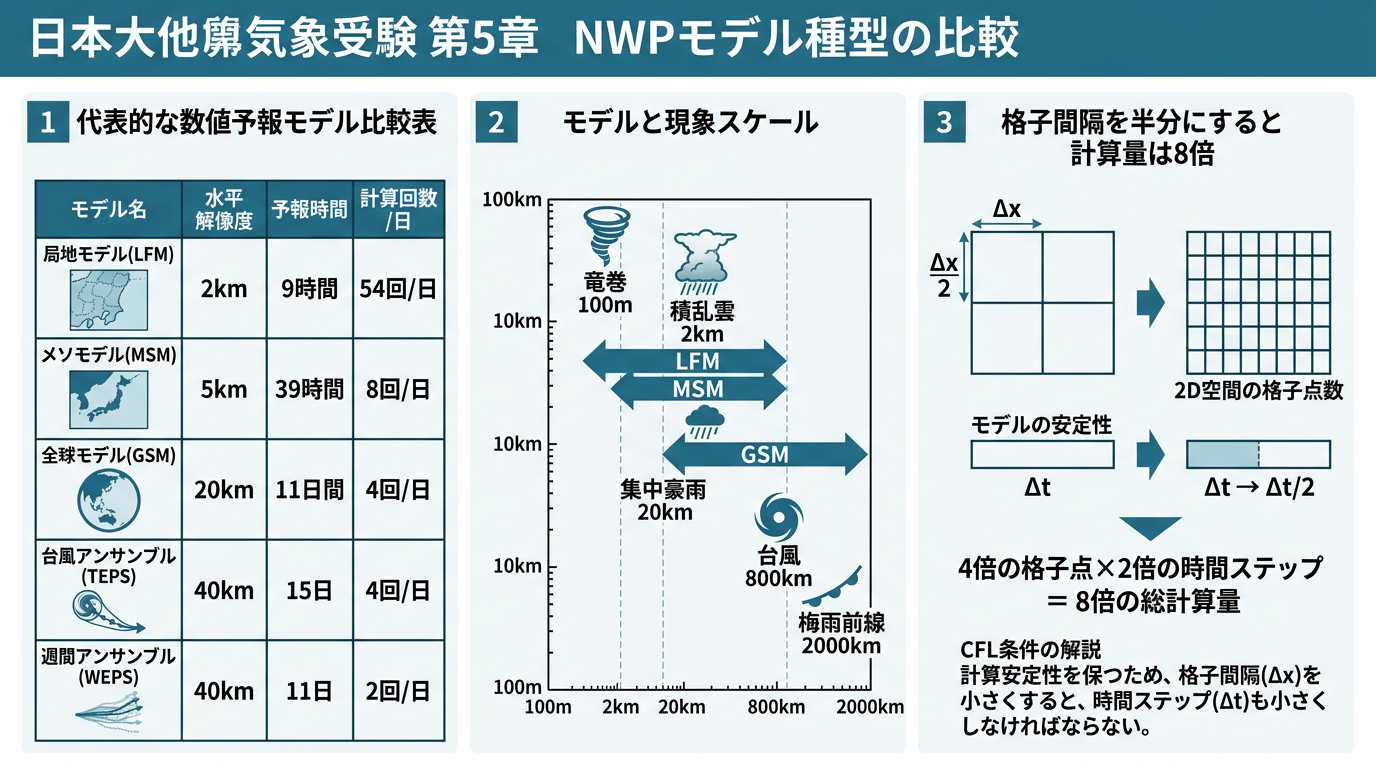
▲ 数値予報モデル比較(LFM・MSM・GSM等)と表現可能な現象スケール
局地モデル (LFM)
- 水平解像度:2km、鉛直60層(地上〜80hPa)
- 予報時間:9時間予報
- 発表回数:1日54回(毎正時)
- 目的:局地予報・防災気象情報・飛行場予報・降水予報
- 初期値作成:4次元変分法(非静力学)
- 個々の積乱雲(数km)の予測は水平解像度2kmでも困難
メソモデル (MSM)
- 水平解像度:5km、鉛直75層(地上〜0.1hPa)
- 予報時間:39時間(36時間)予報
- 発表回数:1日8回(00・03・06・09・15・18・21時)
- 目的:短期予報・防災気象情報・航空予報・台風予報・高潮予報
- 非静力学モデル(鉛直流も運動方程式で計算)
- 大気境界層の鉛直解像度を密にしている
- 表現可能な現象:25〜40km以上の水平スケール(格子間隔の5〜8倍)
全球モデル (GSM)
- 水平解像度:20km、鉛直100層(地上〜0.01hPa)
- 予報時間:11日間予報(84時間まで4回/日、以降も継続)
- 発表回数:1日4回(09・15・21・03時)
- 目的:短期予報・週間予報・台風予報・府県天気予報
- 静力学近似モデル(対流性の強い鉛直流は実際より小さく計算)
- 総観スケール以上(水平2000km以上)の現象の予報に適
- 鉛直層の最上層はメソモデルより高く、成層圏も解析
アンサンブル予報モデル
- 台風アンサンブル(TEPS):水平40km、15日間(5.5日)、1日4回
- 週間アンサンブル(WEPS):水平40km、11日間、1日2回
- 初期値にわずかな差を与えた複数の予報で不確実性を推定
6. 数値予報モデルの一覧表(LFM・MSM・GSM等)
| モデル名 | 水平解像度 | 鉛直層数 | 予報時間 | 1日の予報回数 | 主な用途 |
|---|---|---|---|---|---|
| 局地モデル(LFM) | 2km | 60層 | 9時間 | 54回(毎正時) | 局地予報・防災 |
| メソモデル(MSM) | 5km | 75層 | 39(36)時間 | 8回 | 短期予報・防災・航空 |
| 全球モデル(GSM) | 20km | 100層 | 11日間 | 4回 | 短期〜週間・台風 |
| 台風アンサンブル(TEPS) | 40km | 100層 | 15日(5.5日) | 4回 | 台風進路 |
| 週間アンサンブル(WEPS) | 40km | 100層 | 11日間 | 2回 | 週間天気・異常天候 |
各モデルは数年ごとに更新されるため、具体的な数値より「相対的な関係(MSM<GSMの格子間隔」等)の理解が重要
7. パラメタリゼーション(格子間隔以下の物理過程)
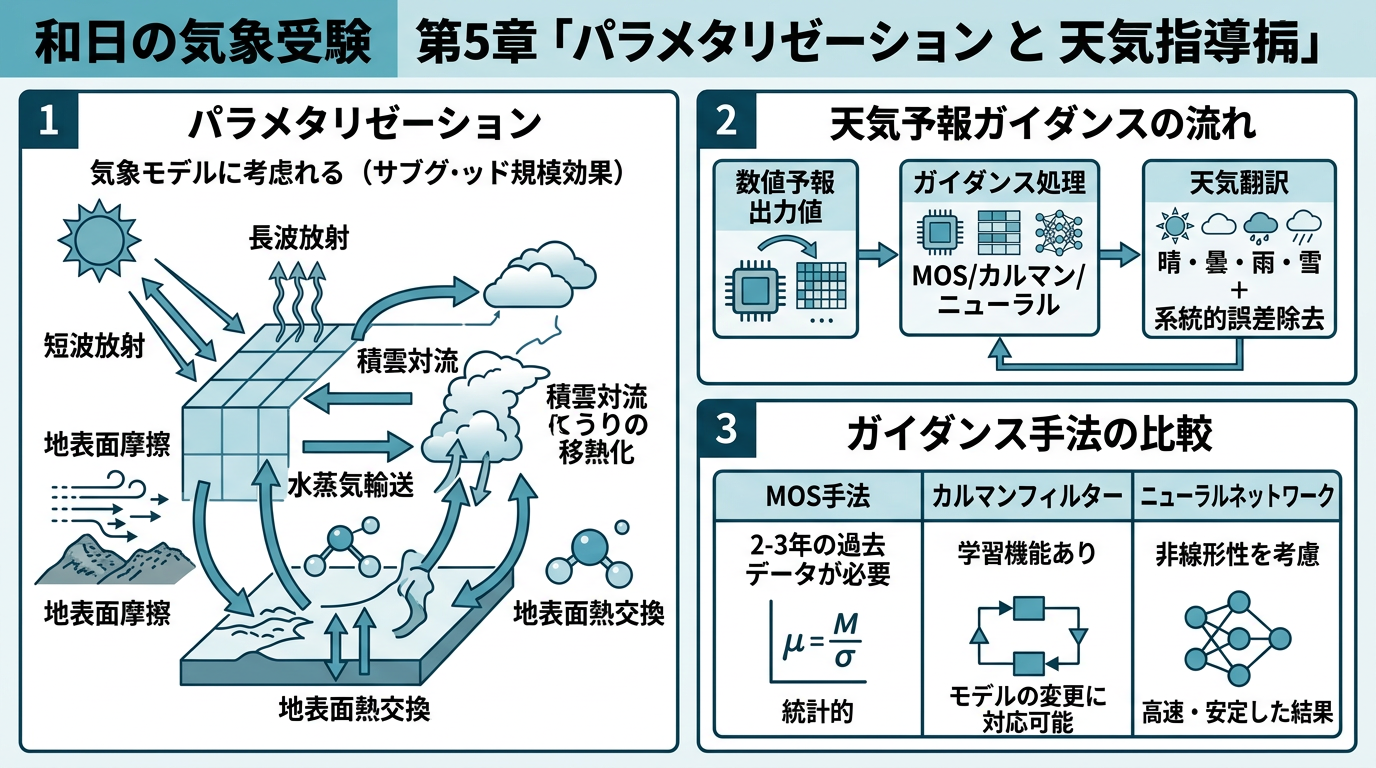
▲ パラメタリゼーションで考慮される物理過程と天気予報ガイダンスの仕組み
- パラメタリゼーション:格子間隔以下のスケールの大気運動による物理効果を格子間隔の平均値として計算に取り込む手法
-
考慮される物理過程:
- 短波放射(太陽放射):地表面を加熱、雲量により変化
- 長波放射(地球放射):気温・水蒸気・CO₂が吸収、地表面に再放射
- 地表面・山岳の摩擦抵抗:気流の回避・乗り越えによる変化
- 水蒸気の輸送:対流・水平移流、凝結・蒸発の際の潜熱授受
- 水蒸気の凝結・水滴の蒸発:降水粒子形成、水の三態変化
- 地表面の状態:砂漠・植生・海陸・積雪等による水蒸気輸送・反射率の違い
- 大気境界層の乱流:熱・水蒸気・運動量の鉛直輸送
- CFL条件:格子間隔を半分にすると格子数が4倍、時間ステップも半分にする必要があり計算量は8倍になる
【CFL条件と計算量の関係】
格子間隔を1/2にすると:
- 水平格子数:4倍(縦2倍×横2倍)
- 時間ステップ:1/2(CFL条件)
- 元の予報期間を計算する場合:2倍の時間が必要
- トータル計算量:4倍 × 2倍 = 8倍
8. 数値予報の短所と予報精度の限界
- ① スピンアップ:予報計算開始初期に上昇流や降水量が平均して小さく予想される
- ② 対流性降水量の予報精度:静力学平衡前提の全球モデルは対流性降水量を小さく予想しがち
- ③ タイムステップの制約:CFL条件により格子間隔に応じたタイムステップの上限あり
- ④ 水蒸気が関与する現象の誤差:局地的大雨など水蒸気が大きく関与する現象は誤差が大きくなりやすい
- ⑤ 援乱スケールが小さい場合:寿命が短く変化が速いため予報誤差大・予報可能期間短
- ⑥ 予報期間の限界:総観規模以上で約10〜15日が限界(週間予報後半の的中率低下の一因)
- ⑦ カオス性:初期値の微小な差が数日後には全く異なる結果を生む大気の非線形性
- ⑧ 積雲対流の鉛直流:現実より小さく計算される傾向
💡 系統的誤差とは
- 偏った方向を持つ継続的な誤差
- 地形データの粗さから生じる気温・風の誤差が代表例(天気予報ガイダンスで除去可能)
- 低気圧・前線の位置誤差(位相誤差)はガイダンスでは除去できない
9. 天気予報ガイダンス(MOS・カルマン・ニューラル)
- 天気予報ガイダンス:数値予報の数値出力を「晴・曇・雨・雪」などの天気要素に翻訳し、系統的誤差を軽減する作業
- 数値予報では降水確率・天気・気温などを直接出力しているのではなく、ガイダンスにより翻訳
- 降水確率ガイダンス:予報対象期間内に1mm以上の降水がある確率を示す(種類問わず)
- 大雨確率ガイダンス:予報対象領域内の少なくとも1地点で3時間に暖候期30mm以上・寒候期20mm以上の確率
MOS手法
過去2〜3年以上の数値予報結果と観測値の統計的関係式を作成し適用。長所:長期データによる安定した精度。短所:関係式作成に2〜3年必要、モデル変更に対応しにくい。
カルマンフィルター(KLM)
関係式の係数を直近の観測値を用いて逐次最適補正。長所:短期間で精度安定、モデル変更に柔軟対応、学習機能・バイアス修正。短所:場の急激な変化に対応しにくい。天気・降水量・降水確率・気温・風に使用。
ニューラルネットワーク(NRN)
人工神経ネットワークで線形・非線形の対応関係を発見。長所:非線形対応、学習機能あり、モデル変更に柔軟、短時間で安定。短所:最適化の保証なし、場の急激な変化に対応しにくい。天気・湿度・大雨確率・発雷確率に使用。
【ガイダンスで除去できる誤差・できない誤差】
- 除去できる:地形の粗さに起因する系統的誤差(気温・風等)
- 除去できない:低気圧・前線・台風等の位置(位相)の誤差。数値予報そのものが現象を外した場合の誤差
10. 📋 理解チェックテスト(5問)
【問1】
客観解析について正しいものはどれか。
① 客観解析では定時観測データのみを使用する
② 第一推定値は現在の観測データのみから作成される
③ 海上に観測データが存在しない格子点では、第一推定値がそのまま解析値となる
④ 初期値化は、観測データが第一推定値と完全一致した場合には不要である
💡 解答・解説
正解:③
①誤り:4次元変分法により非定時データも利用。②誤り:第一推定値は前回の予報値から作成。③正しい。④誤り:初期値化は常に必要。
【問2】
数値予報モデルの水平格子間隔について正しいものはどれか。
① メソモデル(MSM)の水平格子間隔は20kmである
② 全球モデル(GSM)は水平格子間隔が5kmで日本周辺を対象とする
③ 局地モデル(LFM)は水平格子間隔2kmで1日54回予報を発表する
④ 格子間隔を半分にすると計算量は4倍になる
💡 解答・解説
正解:③
①誤り:MSMは5km。②誤り:GSMは20kmで全球対象。③正しい。④誤り:8倍になる。
【問3】
天気予報ガイダンスについて正しいものはどれか。
① ガイダンスは数値予報から直接天気(晴・曇・雨)を出力する
② カルマンフィルター手法は2〜3年以上の過去データが必要である
③ 天気予報ガイダンスにより、前線の位置誤差に起因する降水域のずれを修正できる
④ ガイダンスにより地形が原因の系統的誤差を軽減できる
💡 解答・解説
正解:④
①誤り:ガイダンスが翻訳を行う。②誤り:それはMOS手法。③誤り:位相誤差はガイダンスで除去不可。④正しい。
【問4】
メソモデル(MSM)の特性として正しいものはどれか。
① メソモデルは静力学近似を用いた静力学モデルである
② メソモデルは地球全体を対象とした全球モデルである
③ メソモデルは対流圏下層の大気境界層の鉛直解像度を密にしている
④ メソモデルの格子間隔では、水平スケール5km以上の現象を全て表現できる
💡 解答・解説
正解:③
①誤り:非静力学モデル。②誤り:日本周辺が対象。③正しい。④誤り:格子間隔の5〜8倍(25〜40km以上)が必要。
【問5】
4次元変分法について正しいものはどれか。
① 4次元変分法では客観解析時刻ちょうどの観測データのみを使用する
② 4次元変分法は3次元変分法より計算量が少ない
③ 4次元変分法ではウィンドプロファイラなどの時間連続データを効果的に利用できる
④ 4次元変分法では降水量のような予報変数でない観測データは利用できない
💡 解答・解説
正解:③
①誤り:前後の観測データも時間内挿で利用。②誤り:計算量は多い。③正しい。④誤り:1時間降水量等も利用可能。
11. 📋 過去問チャレンジ(5問)
【平成17年度第2回 専門知識 問5】
数値予報で用いられる解析予報サイクルについて述べた次の文(a)〜(d)の正誤の組み合わせとして正しいものを選べ。
(a) 解析のための第一推定値として予報値を用いるため、初期値化は必要ない。
(b) 観測データの密度が高い領域では解析値の精度は一層向上し、粗いところでは一層悪化していく。
(c) 予報値や周囲の観測データと大きく異なる観測データは、品質に問題があるとみなして解析には使用しない。
(d)
数値予報モデルの予報誤差の成長の仕方が季節的な気象状況によって異なるため、解析値の精度は年間を通じて一様にはならない。
① (a)正(b)正(c)正(d)正
② (a)正(b)誤(c)正(d)誤
③ (a)誤(b)正(c)誤(d)正
④ (a)誤(b)誤(c)正(d)正
⑤ (a)誤(b)誤(c)誤(d)誤
💡 解答・解説
正解:④((a)誤(b)誤(c)正(d)正)
(a)誤:初期値化は常に必要(慣性重力波除去のため)。(b)誤:観測密度が高いほど精度は向上するが無限に上がるわけではなく、低い場合も無限に悪化するわけではなく下げ止まりがある。(c)正:品質管理により除外。(d)正:夏季は水蒸気依存が高く梅雨期は予報が難しいなど季節によって精度が異なる。
【平成24年度第2回 専門知識 問5】
下記の式は気象庁の全球数値予報モデルで用いられるある物理量の予報方程式の構成を示すものである。空欄(a)〜(d)に入る適切な語句の組み合わせを選べ。
格子点における物理量の時間変化=移流による変化+コリオリ力による変化+気圧傾度力による変化+パラメタリゼーション項
この式は大気の(a)に関する予報方程式である。コリオリ力は地球の(b)に比例する。パラメタリゼーション項は格子間隔より(c)スケールの現象の効果を取り入れるもので、積雲対流や(d)による効果が含まれる。
① (a)温度(b)自転角速度(c)大きい(d)分子粘性
② (a)水平風(b)自転角速度の2乗(c)大きい(d)分子粘性
③ (a)水平風(b)自転角速度(c)小さい(d)分子粘性
④ (a)水平風(b)自転角速度(c)小さい(d)乱流
⑤ (a)温度(b)自転角速度の2乗(c)小さい(d)乱流
💡 解答・解説
正解:④
(a)水平風:コリオリ力と気圧傾度力は水平運動方程式の項。(b)自転角速度:コリオリパラメータは地球の自転角速度と緯度の正弦に比例。(c)小さい:パラメタリゼーションは格子間隔より小さいスケールの現象を取り込む。(d)乱流:大気境界層の乱流による運動量・熱・水蒸気の鉛直輸送がパラメタリゼーションで考慮される。分子粘性は極めて小さく気象スケールでは無視できる。
【平成24年度第1回 専門知識 問6】
気象庁の数値予報の客観解析で用いている4次元変分法について述べた次の文(a)〜(d)の正誤の組み合わせで正しいものを選べ。
(a)
4次元変分法は、数値予報で用いられる風・気温・気圧などの時間変化を支配する物理法則を利用して、数値予報の初期値を作成する手法である。
(b) 4次元変分法では、数値予報の初期時刻と異なる時刻に観測されたデータを効果的に利用することができる。
(c) 4次元変分法では、1時間降水量のような予報変数でない観測データを利用することができない。
(d)
4次元変分法では、ウィンドプロファイラ観測による高層風データ等の時間的に連続なデータを効果的に利用することができる。
① (a)正(b)正(c)誤(d)正
② (a)正(b)正(c)誤(d)誤
③ (a)正(b)誤(c)正(d)誤
④ (a)誤(b)誤(c)正(d)正
⑤ (a)誤(b)誤(c)正(d)誤
💡 解答・解説
正解:①((a)正(b)正(c)誤(d)正)
(a)正:4次元変分法は物理法則(数値予報方程式)を利用して初期値を作成。(b)正:4次元(時間軸を含む)により異なる時刻の観測データも利用可能。(c)誤:1時間降水量のような非予報変数でも、対応する天気要素との関係から逆算して利用可能。(d)正:ウィンドプロファイラ等の時間連続データは4次元変分法で特に有効に活用できる。
【平成25年度第1回 専門知識 問5】
数値予報に関する次の文(a)〜(c)の正誤の組み合わせとして正しいものを選べ。
(a) 数値予報では初期値に含まれる小さな誤差が予報時間とともに増大し、予報結果が大きく違ってくることがある。
(b)
一般に大気中のじょう乱の寿命とそのじょう乱の予測が可能な期間には正の相関がある。また、じょう乱の水平スケールと予測が可能な期間にも正の相関がある。
(c) 数値予報モデルでは、水平スケールが格子間隔と同程度以上の現象を表現することができる。
① (a)正(b)正(c)正
② (a)正(b)正(c)誤
③ (a)正(b)誤(c)誤
④ (a)誤(b)正(c)正
⑤ (a)誤(b)誤(c)正
💡 解答・解説
正解:②((a)正(b)正(c)誤)
(a)正:初期値の微小な誤差がカオス性により成長して大きな予報誤差につながる。(b)正:じょう乱の寿命・水平スケールが大きいほど予測可能期間は長い(温帯低気圧は1週間先まで、竜巻は不可)。(c)誤:格子間隔の5〜8倍以上のスケールが必要。格子間隔と同程度の現象は表現できない。
【平成24年度第1回 専門知識 問8】
気象庁の天気予報ガイダンスについて述べた次の文(a)〜(d)の正誤の組み合わせとして正しいものを選べ。
(a)
降水確率ガイダンスは、降水量にして1mm以上の雨または0.5mm以上の雪が予報対象期間内に降る確率を示すものである。
(b)
降水量ガイダンスは、数値予報モデルが予測していない大きな降水量が観測されると、それ以降のある期間にわたって、実況の降水量に比べ大きめの降水量を予測する傾向がある。
(c)
気温ガイダンスは、実際の地表面状態の局地性の違いに起因する数値予報モデルの気温の予測誤差を軽減することができる。
(d)
天気予報ガイダンスは、数値予報モデルが前線の位置を精度よく予測できなかった場合、前線の位置のずれに起因する予測誤差を修正できる。
① (a)正(b)正(c)誤(d)正
② (a)正(b)誤(c)正(d)正
③ (a)誤(b)正(c)正(d)誤
④ (a)誤(b)誤(c)正(d)誤
⑤ (a)誤(b)誤(c)正(d)正
💡 解答・解説
正解:③((a)誤(b)正(c)正(d)誤)
(a)誤:降水確率は降水量1mm以上の降水確率(雪の種類区別なし、0.5mm以上の表記は誤り)。(b)正:カルマンフィルターの学習機能により、観測値が大きければ次の予報でも大きめになる傾向がある。(c)正:気温ガイダンスは地形起因の系統的誤差を学習・補正できる。(d)誤:前線の位置誤差(位相誤差)はガイダンスでは補正できない。
12. まとめ
重要項目一覧:
- 数値予報の流れ:観測データ → 品質管理 → 客観解析(第一推定値+観測補正) → 初期値化 → 予報計算 → 予報値
- 第一推定値:前回予報の現在時刻版、客観解析の補正ベース
- 4次元変分法:時間軸を含む4次元で観測データ同化、非定時データも利用可能
- 解析予報サイクル:全球モデルは6時間毎に繰り返し
- LFM(局地):2km・9h・54回/日、MSM(メソ):5km・39h・8回/日、GSM(全球):20km・11日・4回/日
- TEPS(台風アンサンブル):40km・15日・4回/日、WEPS(週間アンサンブル):40km・11日・2回/日
- 格子間隔を半分にすると計算量は8倍(CFL条件)
- パラメタリゼーション:格子間隔以下の物理過程(積雲対流・放射・乱流等)を平均値として取り込む
- 数値予報の短所:スピンアップ・水蒸気誤差・カオス性・格子間隔の制約、予報限界約10〜15日
- ガイダンス手法:MOS(統計的・長期データ必要)、カルマンフィルター(逐次更新・柔軟)、ニューラルネットワーク(非線形・高速)
- ガイダンスで除去できる誤差:地形起因の系統的誤差。除去できない誤差:位相誤差(低気圧・前線位置)
難易度:★★★★☆(数値予報モデルの一覧表と客観解析の流れを確実に暗記!過去問の出題パターンを理解すれば得点源になります!)
この記事について
気象予報士試験の合格を目指す方のために、専門知識を初学者向けにわかりやすく解説しています。数値予報は各モデルのスペック一覧と客観解析の流れが最重要です。ガイダンス手法の特徴比較も確実に押さえましょう!